eCo Suite
Integrated Development Environment for Heterogeneous Embedded Systems based on the Software Communications Architecture (SCA) v4.1.


eCo Suite is an integrated development environment (IDE) for the development of software defined systems based on the Software Communications Architecture version 4.1 (SCAv4.1). It includes the SCA core framework and a set of tools for the development, test, and integration of applications and platforms. eCo Suite utilizes a Model Driven Environment (MDE) which simplifies the development of your embedded systems and applications, streamlining the development and test cycles to help you get your product to market faster.
eCo Suite for SCA 4.1 is built on two decades of technological development and experience that has been gathered from interactions with government and industry professionals. eCo Suite provides the ideal integrated development environment (IDE) for Software Communications Architecture (SCA) based software defined systems. It is used worldwide by military and civilian wireless equipment manufacturers and by certification authorities as the implementation of reference. The Suite is compliant with SCA version 4.1 of the SCA open standard and offers backward compatibility with SCA version 2.2.2.
Main Components
eCo Hub implements the SCA 4.1 Core Framework (CF) that deploys, configures, and controls software applications on the target embedded system platform.
eCo Architect is a Model Driven Environment (MDE) following a Component-Based Development (CBD) approach that covers the complete development life cycle from modeling and validation of components, to full behavioral generation of SCA compliant C++ source code, as well real-time model validation, and component assembly into applications or nodes.
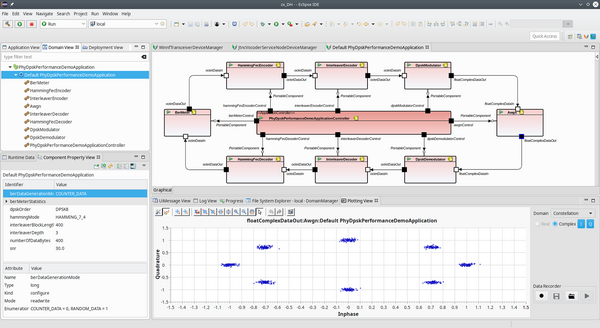
- eCo Inspector offers a runtime view of the SCA system design. This introspection tool provides multiple views to allow developers to visualize the software structure of any SCA compliant platform.
- eCo DSP Toolbox is a library of signal processing components that are commonly used in wireless communications systems.
- SCA Devices or Services delivers a group of open and publicly available APIs
Benefits
eCo Suite contains all the tools you need to design, develop, test and operate your Software Defined Systems. Key benefits of using eCo Suite for your SCA SDR project:
- Model, create, deploy, and test software components in real time on a wide range of operating environments.
- Supports backwards compatibility with SCAV2.2.2.
- User friendly debugging and logging features for code verification and error correction.
- Reuse content across product lines to reduce development time
Below are key features and capabilities for each of the eCo Suite components:

eCo Hub
eCo Hub implements the SCA 4.1 Core Framework (CF) that deploys, configures, and controls software applications on the target embedded system platform. The following key features make eCo Hub a must-have core framework for creating SCA systems:
- Supports the largest combination of operating systems, object request brokers, and processors.
- Implements SCA 4.1 Full Profile with support for nearly all Units of Functionality.
- Boasts a High-Speed Core Framework for exceptional real-time features to minimize the boot time of an SCA system.
- Supports the Application Backward Compatible Unit of Functionality of SCA 4.1, which allows SCA 2.2.2 applications to be deployed and supports applications made of a mixture of SCA 2.2.2 and SCA 4.1 components.
- Not subject to ITAR restrictions.

eCo Architect
eCo Architect is a Model Driven Environment (MDE) following a Component-Based Development (CBD) approach that covers the complete development life cycle from modeling and validation of components, to full behavioral generation of SCA compliant C++ source code, as well real-time model validation, and component assembly into applications or nodes.
Key features of eCo Architect: Create reusable component properties and ports to easily create similar components, reducing development time.
- Automatically generates all the SCA code from the model. You only need to insert your signal processing logic.
- “Zero-merge” code generation - regenerate code without having to merge two versions of the source code.
- Drag and drop components on the canvas to create applications or platform nodes, capturing containment relationship between deployed components and their target.
- Validate your models in real-time for early error detection and automatically correct them from suggested fixes.
- Convert existing models to comply with the SCA 4.1 and refactor source code that has been generated with the SCARI 2.2.2. tool.
- Supports the Eclipse concept of shared projects which allows common modeling elements to be reused without having to duplicate them.
- Multi-development and operating environment support.

eCo Inspector
eCo Inspector offers a runtime view of the SCA system design. This introspection tool provides multiple views to allow developers to visualize the software structure of any SCA compliant platform.
The following are key features that make eCo Inspector an essential tool for debugging and testing:
- Multiple Domain Control to connect to more than one platform or domain simultaneously; control several systems from the same tool to facilitate debugging of systems with more than one domain.
- Built-in application installer to copy the required artifacts into the file system of an SCA platform.
- Generic property browser that can render every type of SCA property and change values dynamically or in batch mode.
- Device assignments to deploy any application component to a specific processor.
- Assign different application components to specific devices, an essential feature to evaluate performance.
- Real-time, peak, and average value plotting capabilities to allow visualization of Time Domain, Frequency Domain, and Constellation graphs.
- Real-time platform analysis reports the status of every component, refreshing the views and block diagrams when needed.
- Lock/unlock specific device components or shut down a complete node or individual components to create different deployment scenarios and test applications under different conditions.
- Different types of views for displaying the deployed software components and related information:
- Domain View, Application View, and Deployment View use a tree-like structure, where each node represents a component.
- Block diagram views use a block for each deployed component.
- Capability to help transition applications and nodes from SCA 2.2.2 to SCA 4.1.

eCo DSP Toolbox
eCo DSP Toolbox is a library of signal processing components that are commonly used in wireless communications systems.
|
|
Those SCA components are ready-made for use in eCo Architect as drag-and drop components. They are provided to enable a quick start in waveform development. They are provided in C++ source code with the eCo Architect SCA models, so they can be modified or substituted with company proprietary implementations. They have been tested in a Linux / x86 environment.
The Toolbox also contains two demonstration applications, Amplitude Modulation (AM) and Frequency Modulation (FM), that serve as a simple tutorial for the use of the Suite.

SCA Devices
To achieve the hardware abstraction promoted by the SCA specifications, several Applications Programming Interfaces (APIs) have been defined by the Joint Tactical Network Center (JTNC) and by the Wireless Innovation Forum (WInnF). As part of the eCo Suite, those open and publicly available APIs have been implemented as SCA Devices or Services.
|
|
VIAVI offers a variety of purchase options to ensure customers get the eCo Suite tool(s) that best suit their needs. eCo Suite components can be purchased in the following configurations:
| Package | SCARI Suite Components | ||||
|---|---|---|---|---|---|
| eCo Suite | |||||
| SCA Core Framework | |||||
eCo Design Tool | |||||
| eCo Supplements | |||||
Contact VIAVI regarding custom product configurations.
Software Distribution
eCo Hub is provided in Object Code compiled for your operating environment (OE) defined by the combination of Processor / Operating System / CORBA ORB. It can be used for any project at your site that uses the specified OE.
The eCo Design Tools are offered in binary format and are licensed on a per Developer basis. They can be used for any project, using any of the licensed eCo Hub.
The eCo Supplements are provided as source code and can be used by any licensed Developer on any of the eCo Hub framework.